6.4前馈神经网络
前馈神经网络(Feedforward Neural Network)是最早被提出的神经网络,我们熟知的单层感知机、多层感知机、卷积深度网络等都属于前馈神经网络,它之所以称为前馈(Feedforward),或许与其信息往前流有关:数据从输入开始,流过中间计算过程,最后达到输出层。模型的输出和模型本身没有反馈(Feedback)连接。有反馈连接的称为反馈神经网络,如循环神经网络(Recurrent neural network,简称为RNN),RNN将在第15章介绍。本书如果没有特别说明,神经网络一般指前馈神经网络。
前面我们介绍了机器学习中几种常用算法,如线性模型、SVM、集成学习等有监督学习,这些算法我们都可以用神经网络来实现,如图6-22所示,神经网络的万能近似定理(universal approximation theorem)为重要理论依据。如果用神经网络来实现,还有很多便利,可自动获取特征、自动(或半自动)选择模型函数等。神经网络可以解决传统机器学习问题,更可以解决传统机器学习无法解决或难以解决的问题。因此,近些年神经网络发展非常快、应用也非常广。

图6-22线性模型的神经元
神经网络是深度学习的重要基础,深度学习中的深一般指神经网络的层次较深。接下来我们从最简单也最基础的神经元开始,然后介绍单层感知机、单层感知机的局限性、多层感知机、构建一个多层神经网络、前向传播及反向传播算法及实例等内容。
6.4.1神经元结构
1943年,心理学家McCulloch和数学家Pitts参考了生物神经元的结构(请看图6-23),发表了抽象的神经元模型MP。一个神经元模型包含输入、计算、输出等功能。图6-23是一个典型的神经元模型:包含有3个输入、1个输出、计算功能(先求和,然后把求和结果传递给激活函数f)。
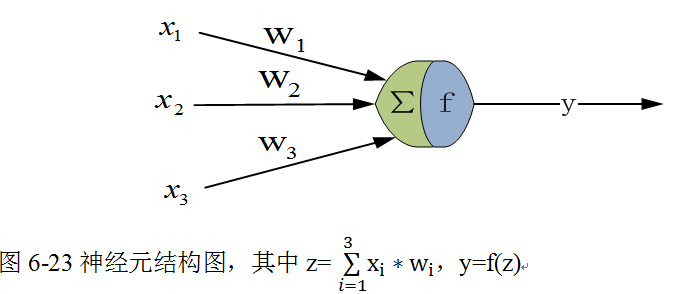
其间的箭头线称为“连接”。每个连接上有一个“权值”,如上图〖的w〗_i,权重是最重要的东西。一个神经网络的训练算法就是让权重的值调整到最佳,以使得整个网络的预测效果最好。
我们使用x来表示输入,用w来表示权值。一个表示连接的有向箭头可以这样理解:在初端,传递的信号大小仍然是x,中间有加权参数w,经过这个加权后的信号会变成x*w,因此在连接的末端,信号的大小就变成了x*w。
输出y是在输入和权值的线性加权及叠加了一个函数f后的值。在MP模型里,函数f又称为激活函数,激活函数将数据压缩到一定范围区间内,其值大小将决定该神经元是否处于活跃状态。
从机器学习的角度,我们习惯把输入称为特征,输出y=f(z)为目标函数。
在6.1.1.小节介绍的逻辑回归实际上就是一个神经元结构,输入为x,参数有w(权重),b(偏移量),求和得到:z=wx+b ,式(6.5)中函数f就是激活函数,该激活函数为阶跃函数。
6.4.2感知机的局限
在讲感知机的局限之前,我们先简单介绍一下感知机。在感知机中,“输入”也作为神经元节点,标为“输入单元”。感知机仅有两个层:分别是输入层和输出层。输入层里的“输入单元”只负责传输数据,不做计算。输出层里的“输出单元”则需要对前面一层的输入进行计算。
图6-24就是一个简单的感知机模型,输入层有3个输入单元,输出层有2个神经元。
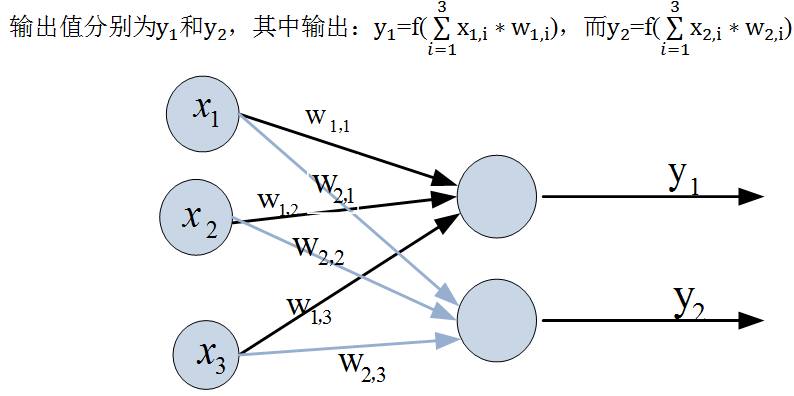
图6-24感知机模型
如果我们把输入的变量x_1、x_2、x_3用向量X来表示,即X=[x_1,x_2,x_3 ]^T。权重构成一个2*3矩阵 W(第一行下标为1开头的权重,第2行下标为2开头的权重),输出表示为Y=[y_1,y_2 ]^T。这样输出公式可以改写成:
Y= f(W * X)(6.29)
其中f是激活函数。对激活函数,一般要求:
1)非线性:为提高模型的学习能力,如果是线性,那么再多层都相当于只有两层效果;
2)可微性:有时可以弱化,在一些点存在偏导即可;
3)单调性:保证模型简单。
与神经元模型不同,感知器中的权值是通过训练得到的。如何训练?这主要通过前向传播和反向传播,具体操作后续将详细介绍。感知器对线性可分或近似线性可分数据有很好效果,对线性不可分数据效果不理想。Minsky在1969年出版了叫《Perceptron》的一本书,里面用详细的数学证明了感知器无法解决XOR(异或)分类问题。这应该是比较简单的分类问题,用传统的机器学习算法如SVM等能很好解决,用感知器却无法解决。当时很多人做过多种尝试,如增加输出层的神经个数、调整激活函数等,但结果都不尽人意。后来有人通过增加层数,问题就迎刃而解。接下来我们介绍多层神经网络。
6.4.3多层神经网络
解决XOR问题也不是一帆风顺,增加层实际上很多人都想到了。但增加层以后,计算量、计算的复杂度就上来了,还有如何缩小误差,如何求最优解等问题也自然而然地出现。传统机器学习中我们可以通过梯度下降或最小二乘法等算法解决,但对神经网络如何优化,困扰大家很长时间。
直到1986年,Hinton和Rumelhar等人提出了反向传播(Backpropagation,简称BP)算法,解决了两层神经网络所需要的复杂计算量问题,从而带动了业界使用两层神经网络研究的热潮。目前,大量介绍神经网络的教材,一般重点介绍两层(带一个隐藏层)或多层神经网络的内容。
多层神经网络(含一层或多层隐含层)结构与神经元有何区别呢?图6-25就是一个简单的多层神经网络,除有一个输入层,一个输出层外,中间还有一层,这中间层因看不见其输入或输出数据,所以称为隐含层。
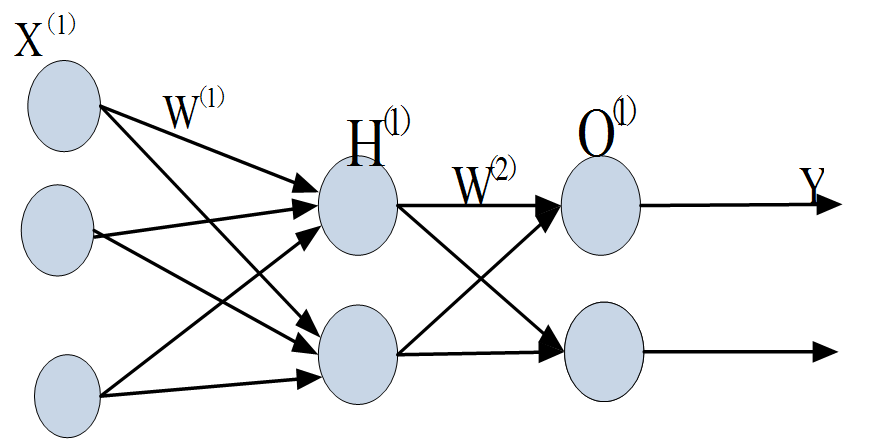
图6-25多层神经网络示意图
现在,我们的权值矩阵增加到了两个,我们用上标来区分不同层次之间的变量。
这里我们使用向量和矩阵来表示层次中的变量,如输入层表示为X^((1)),隐含层为H^((1)),O^((1))是为输出层。W^((1))和W^((2))是网络的矩阵参数。用矩阵来描述,可得到如下计算公式:
f(W^((1))*X^((1)))=H^((1))(6.29)
f(W^((2))*H^((1)))=O^((1))(6.30)
接下来,我们看多层神经网络如何处理XOR问题。
1)首先我们来看,何为XOR问题。
表6-2 异或问题
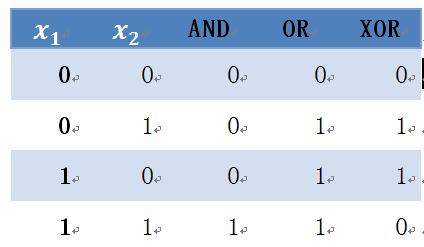
表6-2 可视化结果为图6-26,其中圆点表示0,方块表示1。AND、OR、NAND问题都是线性可分,但XOR是线性不可分。
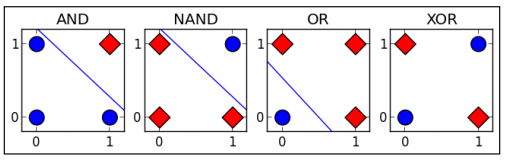
图6-26异或问题示意图
2)构建多层网络
(1)确定网络结构
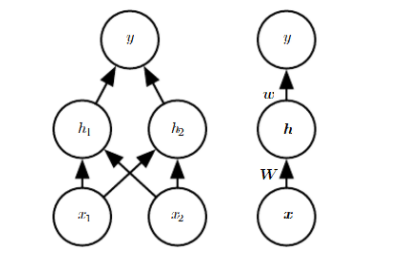
图6-27解决XOR问题的网络结构,左边为详细结构,右边为向量式结构,这种结构比较简洁,而且更贴近矩阵运算模型。
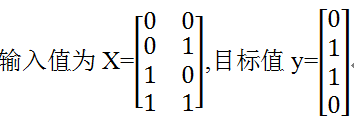
(2)确定输入
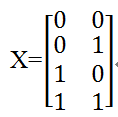
由表6-2可知,输入数据中有两个特征:x_1,x_2,共有4个样本。分别为〖[0,0]〗^T,〖[0,1]〗^T,〖 [1,0]〗^T,〖[1,1]〗^T,详细内容见表6-2。取x_1,x_2两列,每行代表一个样本,每个样本x都 是一个向量,如果用矩阵表示就是:
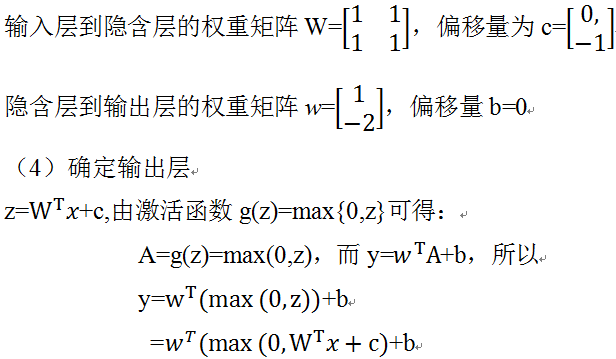
(3)确定隐含层及初始化权重矩阵W、w
隐含层主要确定激活函数,这里我们采用整流线性激活函数: g(z)=max{0,z},如图6-28所示。
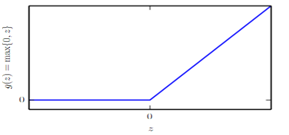
图6-28整流线性激活函数(ReLU)图形
初始化以下矩阵:
(5)计算
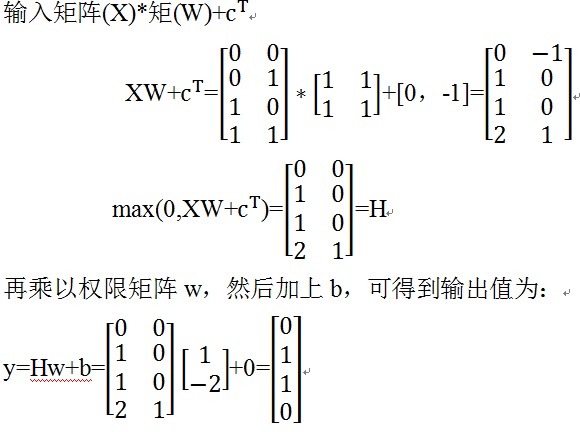
这样神经网络就得到我们希望的结果。
如何用程序如何实现XOR呢?下节将具体说明。
6.4.4实例:用TensorFlow实现XOR
上节通过一个实例具体说明了如何用多层神经网络来解决XOR问题,不过在计算过程中我们做了很多人工设置,如对权重及偏移量的设置。如果用程序来实现,一般不会这样,如果维度较多,手工设置参数也是不现实的。接下来我们介绍如何用TensorFlow来实现XOR问题。用程序实现,总的思路是:用反向传播算法(BP),循环迭代,直到满足终止条件为止。如果你对BP算法不熟悉,下节将详细介绍。具体步骤如下:
(1)明确输入数据、目标数据
(2)确定网络架构
网络架构采用图6-27
(3)确定几个函数
激活函数、代价函数、优化算法等。这里激活函数还是使用ReLU函数,代价函数使用MSE,优化器使用Adam自适应算法。
(4)初始化权重和偏移量等参数
初始化权重和偏移量,只要随机取些较小值即可,无须考虑一些特殊值,最终这些权重值或偏移量,在循环迭代中不断更新。随机生成权重初始化数据,生成的数据符合正态分布。
(5)循环迭代
循环迭代过程中参数会自动更新
(6)最后打印输出
以下我们用TensorFlow来实现XOR问题的详细代码,为尽量避免循环,这里采用矩阵思维,这样可以大大提升性能,尤其在深度学习环境中。如果你对TensorFlow还不是很熟悉,可以先跳过,或先看一下第9章。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 |
import tensorflow as tf import numpy as np #定义输入与目标值 X = np.array([[0, 0], [0, 1], [1, 0], [1, 1]]) Y = np.array([[0], [1], [1], [0]]) #定义占位符,从输入或目标中按行取数据 x = tf.placeholder(tf.float32, [None, 2]) y = tf.placeholder(tf.float32, [None, 1]) #初始化权重,使权重满足正态分布 #w1是输入层到隐含层间的权重矩阵,w2是隐含层到输出层的权重 w1 = tf.Variable(tf.random_normal([2,2])) w2 = tf.Variable(tf.random_normal([2,1])) #定义偏移量,b1为隐含层上偏移量,b2是输出层上偏移量。 b1=tf.Variable([0.1,0.1]) b2=tf.Variable(0.1) #利用激活函数就隐含层的输出值 h=tf.nn.relu(tf.matmul(x,w1)+b1) #计算输出层的值 out=tf.matmul(h,w2)+b2 #定义代价函数或代价函数 loss = tf.reduce_mean(tf.square(out - y)) #利用Adam自适应优化算法 train = tf.train.AdamOptimizer(0.1).minimize(loss) with tf.Session() as sess: sess.run(tf.global_variables_initializer()) for i in range(2000): sess.run(train, feed_dict={x: X, y: Y}) loss_ = sess.run(loss, feed_dict={x: X, y: Y}) if i%200==0 : print("step: %d, loss: %.3f"%(i, loss_)) print("X: %r"%X) print("pred: %r"%sess.run(out, feed_dict={x: X})) |
打印结果
step: 0, loss: 0.212
step: 200, loss: 0.000
step: 400, loss: 0.000
step: 600, loss: 0.000
step: 800, loss: 0.000
step: 1000, loss: 0.000
step: 1200, loss: 0.000
step: 1400, loss: 0.000
step: 1600, loss: 0.000
step: 1800, loss: 0.000
X: array([[0, 0],
[0, 1],
[1, 0],
[1, 1]])
pred: array([[ -7.44201316e-07],
[ 9.99997079e-01],
[ 9.99997139e-01],
[ -7.44201316e-07]], dtype=float32)
6.4.5反向传播算法
上节我们用TensorFlow实现了XOR问题,效果不错。整个训练过程就是通过循环迭代,逐步使代价函数值越来越小。如何使代价函数值越来越小?主要采用BP算法。BP算法是目前训练神经网络最常用且最有效的算法,也是整个神经网络的核心之一,它由前向和后向两个操作构成,其主要思想是:
(1)利用输入数据及当前权重,从输入层经过隐藏层,最后达到输出层,求出预测结果, 并利用预测结果与真实值构成代价函数,这是前向传播过程;
(2)利用代价函数,将误差从输出层向隐藏层反向传播,直至传播到输入层,利用梯度下 降法,求解参数梯度并优化参数;
(3)在反向传播的过程中,根据误差调整各种参数的值;不断迭代上述过程,直至收敛。
这样说,或许你觉得还不够具体、不好理解,没关系。BP算法确实有点复杂、不易理解,接下来,我们将以单个神经元如何实现BP算法为易撕口,由点扩展到面、由特殊推广到一般的神经网络,这样或许能大大降低学习BP算法的坡度。
1.单个神经元的BP算法
以下推导要用到微积分中链式法则,这里先简单介绍一下。链式法则用于计算复合函数,而BP算法需要利用链式法则。设x是实数,假设y=g(x),z=f(y)=f(g(x)),
根据链式法则,可得:
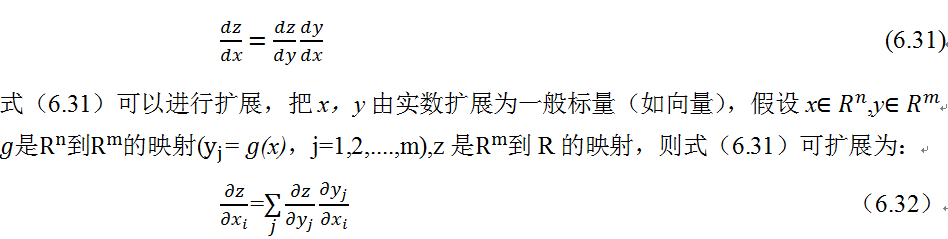
如果用向量表示,式(6.32)可简化为:

我们以单个神经元为例,以下是详细步骤。
(1)定义神经元结构
首先我们看只有一个神经元的BP过程。假设这个神经元有三个输入,激活函数为sigmoid函数:
f(x)=1/(1+e^(-x) ) (6.34)
其结构如图6-29所示
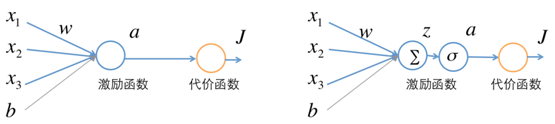
图6-29单个神经元,把左图中的神经元展开就得到右图。
(2)进行前向传播,从输入数据及权重开始,往输出层传递,最后求出预测值a,并与目标值y构成代价函数J。
假设一个训练样本为(x,y),其中x是输入向量,x=[x_1,x_2,x_3 ]^T,y是目标值。先把输入数据与权重w=[w_1,w_2,w_3]乘积和求得z,然后通过一个激励函数sigmoid,得到输出a,最后a与y构成代价函数J。具体前向传播过程如下:
(3)进行反向传播,以代价函数开始,从输出到输入,求各节点的偏导。这里分成两步, 先求J对中间变量的偏导,然后求关于权重w及偏移量b的偏导。先求J关于中间变 量a和z的偏导:


在这个过程中,先求∂J/∂a,进一步求∂J/∂z,最后求得∂J/∂w和∂J/∂b,然后利用梯度下降优化算法,变更参数权重参数w及偏移量b,结合上图(6.27)及链导法则,可以看出这是一个将代价函数的增量∂J自后向前传播的过程,因此称为反向传播。
(4)重复第(2)看代价函数J的误差是否满足要求或是否到指定迭代步数,如果不满足条件,继续(3),如此循环,直到满足条件为止。
这节介绍了单个神经元的BP算法。虽然只有一个神经元,但包括了BP的主要内容,正所谓“麻雀虽小,五脏俱全”。不过与一般神经网络还是有点区别,下节我们介绍一个三层神经网络的BP算法。
2.多层神经网络的BP算法
不失一般性,这里我们介绍一个含隐含层,两个输入,两个输出的神经网络,如图6-30。
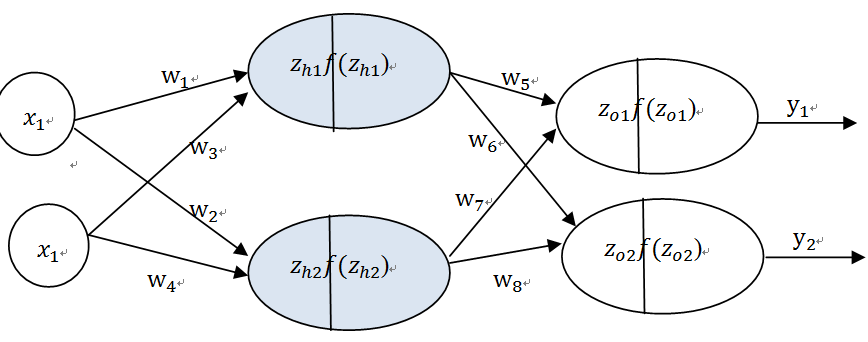
为简便起见,这里省略偏差b,这个实际可以看做X_n*w_n (X_n=1,w_n=b)。激活函数为f(z)=1/(1+e^(-z) ), 共有三层:第一层为输入层,第二层为隐含层,第三层为输出层,详解结构如图6-30。
输入层(x) 隐含层(h) 输出层(o)
图6-31多层神经网络
整个过程与单个神经元的基本相同,包括前向传播和反向传播两步,只是在求偏导时有些区别。
1)前向传播
把当前的权重参数和输入数据,从下到上(即从输入层到输出层),求取预测结果,并利用预测结果与真实值求解代价函数的值。如图6-32:
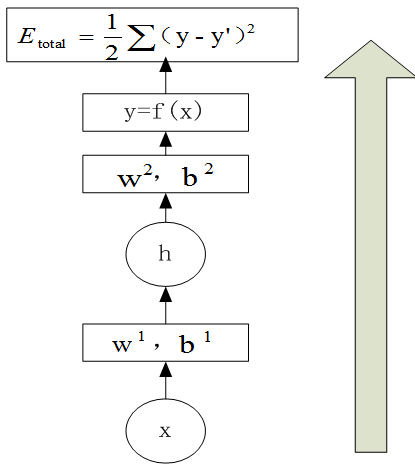
图6-32前向传播示意图
具体步骤如下:
(1) 从输入层到隐含层

(2)从隐含层到输出层

(3)计算总误差

2)反向传播
反向传播是利用前向传播求解的代价函数,从上到下(即从输出层到输入层),求解网络的参数梯度或新的参数值,经过前向和反向两个操作后,完成了一次迭代过程,如图6-33。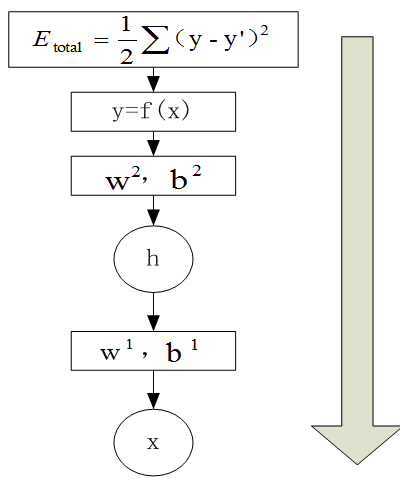
图6-33反向传播示意图
具体步骤如下:
(1)计算总误差

(2)由输出层到隐含层,假设我们需要分析权重参数w_5对整个误差的影响,可以用整体误差对w_5求偏导求出:这里利用微分中的链式法则,涉及过程包括:f(z_O1)--->z_O1----->w_5
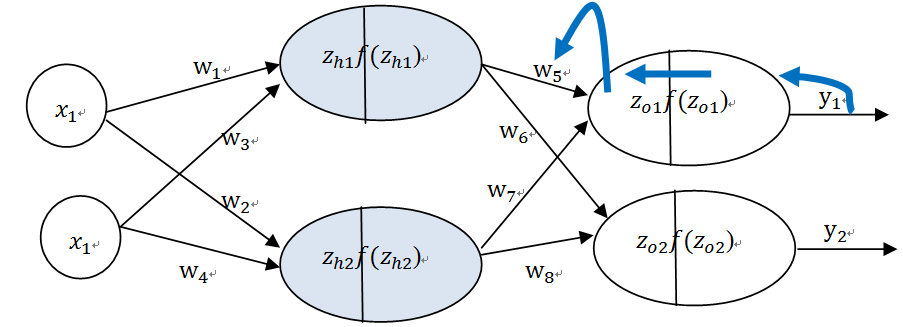
图6-34反向传播有输出层到权重w_5

根据式6.42--6.52,不难求出其他权重的偏导数。
(3)由隐含层到输入层,假设我们需要分析权重参数w_1对整个误差的影响,可以用整体误差对w_1求偏导,过程包括:f(z_h1)--->z_h1----->w_1,不过而f(z_h1)会接受E_o1和E_o2两个地方传来的误差,所以这个地方两个都要计算。
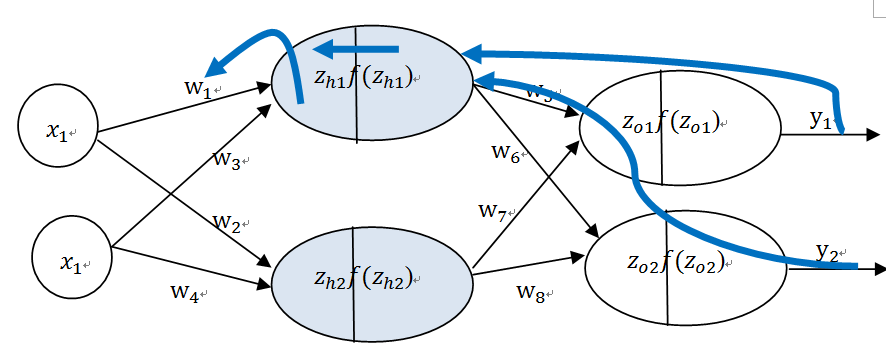
输入层(x) 隐含层(h)输出层(o)
图6-35反向传播由隐含层再到权重w_1
代价函数偏导由隐含层到权重w_1,计算如下:
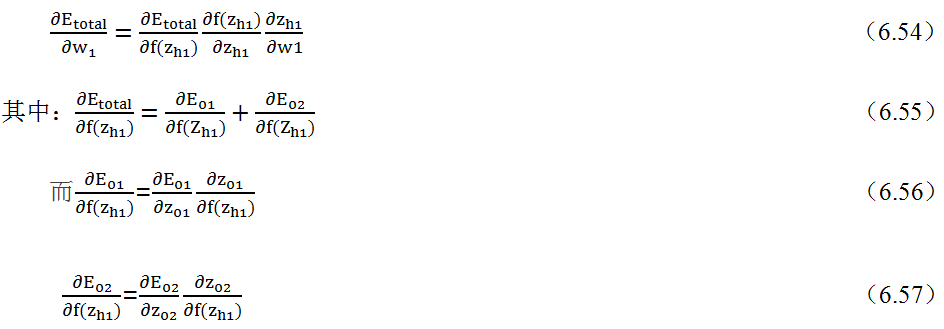
至此,可求得权重w_1的偏导数,按类似方法,可得到其他权重的偏导。权重和偏移量的偏导求出后,再根据梯度优化算法,更新各权重和偏移量。
3)判断是否满足终止条件
根据更新后的权重、偏移量,进行前向传播,计算输出值及代价函数,根据误差要求或迭代次数,看是否满足终止条件,满足则终止,否则,继续循环以上步骤。
现在很多架构都提供了自动微分功能,在具体训练模型时,只需要选择优化器及代价函数,其他无须过多操心。但是,理解反向传播算法的原理对学习深度学习的调优、架构设计等还是非常有帮助的。
6.5 实例:用keras构建深度学习架构
最后给出一个用Keras实现的样例,这里用Keras主要考虑其简洁性,Keras的介绍可参考16.5节。如果你还想进一步了解Keras,可参考Keras中文网站http://keras-cn.readthedocs.io/en/latest/或飞谷云网站:http://www.feiguyunai.com/
|
1 2 3 4 5 6 7 8 9 10 |
#构建模型 model = Sequential() #往模型中添加一层,神经元个数,激活函数及指明输入数据维度。 model.add(Dense(32, activation='relu', input_dim=784)) #再添加一层,神经元个数及激活函数 model.add(Dense(1, activation='sigmoid')) #编译模型,指明所用优化器,代价函数及度量方式等 model.compile(optimizer='Adam',loss='binary_crossentropy',metrics=['accuracy']) #训练模型,指明训练的数据集,循环次数,输出详细程度,批量大小等信息 model.fit(x_train, y_train, epochs=10,verbose=2, batch_size=32,) |